|
|
#41
 05-05-2011, 10:48 AM
05-05-2011, 10:48 AM
|
||||
|
||||
|
not perfect centered but better as nothing http://www.overclock.net/case-mod-wo...t-case-14.html
__________________
GTX570 @940Mhz watercooled Q6600 @3,9Ghz watercooled HP w2207 22" (1680x1050) Eheim 1250 Toyota Radiator XP Home 32bit & Win7 64bit Crucial SSD C300 64GB TrackIR 3 Pro Hotas Cougar + 18cm Extension +Hall Sensors 
|
|
#42
05-08-2011, 03:12 AM
|
|||
|
|||
|
Quote:
I see it as the static friction exceeding the dynamic friction in the bearings (as is normal), so an axis takes more effort to get moving than to keep moving, which makes the stick feel like it prefers to travel along one axis rather than at small diagonal angles. I can feel this tendency in my uni-joint stick a bit, although I have my bearings adjusted fairly tight so that it can hold it's position (I never bothered with centering springs) and provide more resistance. See the attached image, taken from the JoyTest2 program. If the tendency was stronger, you'd see straighter lines more aligned with the axes. If you want to avoid the axis-hugging tendency, adjust the bearing cups to get the desired (lack of) friction. Uni-joints use roller bearings, so you should be able to pretty much remove the tendency. Also, use thin or no oil in the bearings. You'll probably need something to keep the stick centered, such as springs if you do it this way.
__________________
DIY uni-joint / hall effect sensor stick guide: http://www.mycockpit.org/forums/cont...ake-a-joystick
|
|
#43
05-08-2011, 01:30 PM
|
||||
|
||||
|
A squad mate DIY HOTAS with U-Joint gimbal per Julian .PDF.
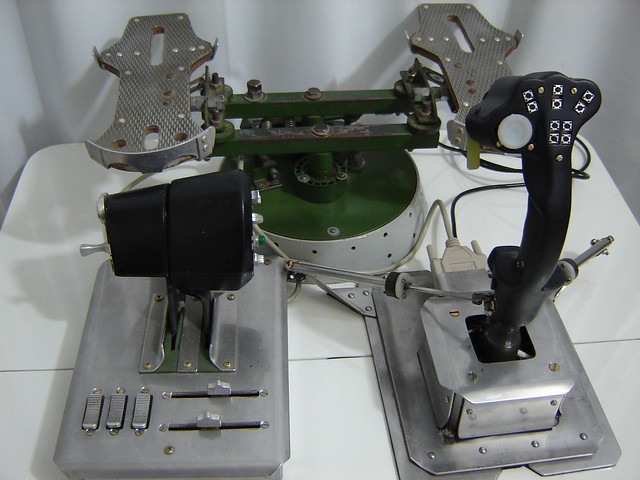 http://www.gavca.com/phpBB3/viewtopic.php?f=49&t=18154 USB Controller L.Bodnar BU0836, Allegro A1321EUAT HALL sensor in X, Y, thottle1, 2 and rudder, slide trim's with pots.  No disassemble U-join need - in this pictures HALL not adjusted (too far from magnet). No springs, use homemade damper with silicone as fluid: Grip made in fiberglass, using a wooden model: http://www.flickr.com/photos/6002358...097065/detail/ Sokol1
|
|
#44
05-25-2011, 09:56 AM
|
|||
|
|||
|
Very helpful, thanks Sokol. I'm now working on a custom stick using one of Leo Bodnar's BU0836X boards and an old quad bike uni joint. Will update when I'm a bit further along - taking longer than I expected due to life getting in the way!
|
|
#45
05-25-2011, 09:56 AM
|
|||
|
|||
|
I know that BU0836X has 32 buttons plus hat available (yeah, should be enough I know) but has anyone used something like autohotkey to map the output of this board to keystrokes? That way you could assign a couple of the digital inputs to Control and Shift and use double-wired combinations to create even more buttons or switches. Then you would map the keystrokes in CoD.
|
|
#46
05-25-2011, 11:23 PM
|
||||
|
||||
|
Quote:
BTW - To tune axis range, set deadband, response curves, use DView or DXTweak2. Sokol1
|
|
#48
05-25-2011, 11:44 PM
|
||||
|
||||
|
My squad-mate (VO101_MMaister) made KG-13 stick to his Cougar joystick. If I would have time to rasp this much ...
") http://www.flickr.com/photos/22174211@N02/5534453281/
__________________
 i7 7700K 4.8GHz, 32GB Ram 3GHz, MSI GTX 1070 8GB, 27' 1920x1080, W10/64, TrackIR 4Pro, G940 Cliffs of Dover Bugtracker site: share and vote issues here
|
|
#49
05-27-2011, 11:15 AM
|
||||
|
||||
|
great custom stick, tom. Looks like original.
my hall sensor chips from a taiwan ebay shop arrived a week ago. Adjusted them with hotglue in ten minutes. Works perfectly! made it with this configuration http://forums.eagle.ru/showthread.php?t=69785
__________________
GTX570 @940Mhz watercooled Q6600 @3,9Ghz watercooled HP w2207 22" (1680x1050) Eheim 1250 Toyota Radiator XP Home 32bit & Win7 64bit Crucial SSD C300 64GB TrackIR 3 Pro Hotas Cougar + 18cm Extension +Hall Sensors Last edited by JumpingHubert; 05-30-2011 at 01:06 AM.
|
|
#50
06-23-2011, 11:19 AM
|
|||
|
|||
|
The X52 Pro has been relegated to the cupboard since I’ve now finished my custom u-joint stick (except for future modifications, of course!) It is a standard universal joint arrangement with Neodymium cube magnets and hall sensors although the centering mechanism is, perhaps, a little unusual in that it is based on magnetic repulsion. If you have seen this done elsewhere please let me know since I would like to link to it.
From Sokol: - http://www.sukhoi.ru/forum/showthread.php?t=59583 - http://translate.googleusercontent.c...WA#post1625474 - http://www.sukhoi.ru/forum/attachmen...4&d=1306861313 I decided on magnetic centering since I do not like the friction of a spring. I did not want to tighten the bearings to stop the stick falling over since I like movement to be as unrestricted as possible for fine control in the centre. Magnetic repulsion centering allows for frictionless movement (apart from the u-joint itself) with resistance that is almost zero in the centre but increases markedly toward the edge. The magnets were bought from http://www.aussiemagnets.com.au. Edit: Note that this is a relatively low force centering mechanism especially when compared to something like 310_Obluda's setup below. It centers the stick fine but does not provide kilograms of resistance. You can click on the photos for larger versions on Flickr.   Stick construction: 1. Bought a used u-joint from a quad bike (a little smaller than a car u-joint) and knocked out the spider. 2. Stripped and regreased the needle bearings and drilled out the bearing cups to accommodate a 1/4" bolt. 3. Reassembled but only loosely tightened the bearing cups so the movement is extremely loose. 4. Glued (araldite) some cut-down 1/4“ bolts into the spider as pictured below. These provide the platforms for the two axis cube magnets (10x10x10mm N42 Neodymium) which I also glued in place. 5. Reduced the play of the stick by judicious use of some Selleys 'Knead-It Steel' metal epoxy (click here) and thin gal plate strips. I chose this method since it is easier to make slight adjustments with the epoxy putty than when welding. 6. Aligned the axis magnets as described (thanks very much for the guide) and added the hall sensors. These were two old Allegro UGN3503UA although the newer Allegro A1321EUA-T could be better. 7. Hooked the axes up to one of Leo Bodnar’s BU0836X cards which I will also use for the control box I am building. 8. Reversed the inevitably backwards hall sensor on the x-axis! 9. Replaced the circuit board in an old Logitech Extreme 3D Pro stick with a custom circuit (a few extra buttons) and used this for the handle.    Centering mechanism construction: Materials were a galvanised steel plate as a base for the stick, 100 mm square tubing and twenty 20x20x5mm N42 Neodymium magnets with 9.2 kg pull. These could be stronger if you want more resistance but N42s are already really challenging to place correctly. 10. Welded the angle brackets (well, bits of cut tubing) on the 90 mm high square tubing. This section is a guard for the hall sensors and a platform for the centering ring to sit on. 11. Welded the 20 mm high square tubing at a 45 degree offset to the guard section. 12. Glued (araldite, clamps and a lot of bad language) the magnets in place, all with north facing to the centre (doesn’t matter which orientation of course as long as they are all the same). 13. Glued the magnets in place on the stick itself in an opposing polarity to the ring magnets (i.e. stick magnets repel ring magnets). Alignment is important: you want the magnets on the stick to be as close to the magnets on the ring as possible at full stick extension so they will actually be slightly higher on a centered stick than on the surround ring. Note that I had to make a platform for the magnets to sit correctly on the stick shaft. More epoxy plus 20 mm square tubing although I could have welded this.    Assembly: 14. Drilled out the holes in the plate to accept both the stick and cage bolts. 15. Bolted the u-joint stick to the plate. 16. Slid the cage down over the stick and bolted it to the plate. 17. That’s it. I have the stick attached to my chair using more square steel tubing of two diameters which slide into each other. Tips: If anyone wants to try this design here are a few tips I learnt the hard way: - Attached the magnets last! These strong magnets attract steel shavings or filings like you wouldn’t believe and are really difficult to clean up. - You will need to glue the magnets in place over a couple of days since placing adjacent magnets is pretty tricky. Use clamps (plastic) to hold them in place if need be. - After trial and error I made the bolt holes used to attach the cage to the plate significantly larger than the bolts since I needed some fine position adjustment to get the stick to sit dead centre. - Sliding the cage down over the stick is difficult since the magnets on the cage ring attract the stick shaft. Best to wrap the shaft in something thick to reduce the attractive force (I used a piece of drilled out wood). - You need an awful lot of force to push the bearings from the spider. The good news is that the cups are strenthened steel so you are unlikely to damage them with a little ‘encouragement’. - You’ll notice that I added some extra 10x10x2.5mm magnets on the stick (see the photo). These just increase the resistance a little. I am really pleased with the outcome. The loose centre is just great for fine adjustments when lining someone up but you don’t lose out by not having centering. I had decreased the strength of the X52 Pro spring by cable ties but the effect is nowhere near as good as this since the spring tension increases rapidly at a particular point. I will, no doubt, replace the stick handle at some point although I have to admit that the internal build quality of the Logitech is actually better than the X52 Pro. Finally, apologies to anyone offended by my rubbish welding skills but this was my first attempt. My rudder pedals look much better since I was getting the hang of how to build up the weld joint but that's another story! Last edited by jimbop; 06-27-2011 at 09:18 AM.
|
 |
|
|







 Linear Mode
Linear Mode

